船舶電力推進(jìn)實時仿真模擬訓(xùn)練平臺
系統(tǒng)概述
-
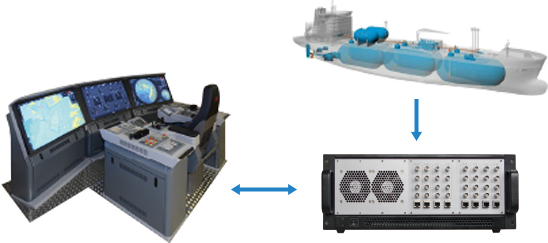
船舶電力推進(jìn)實時仿真模擬訓(xùn)練平臺應(yīng)用于船舶模擬訓(xùn)練與教學(xué)。系統(tǒng)主要分為應(yīng)用層����、服務(wù)層和數(shù)據(jù)庫層。模擬訓(xùn)練系統(tǒng)的數(shù)據(jù)源和受控對象均為仿真模型�����,仿真模型與真實系統(tǒng)的各種監(jiān)控設(shè)備之間從數(shù)據(jù)鏈路層上是相互獨立的。模擬訓(xùn)練系統(tǒng)需要首先建立船舶各種設(shè)備的數(shù)學(xué)模型��。
由于系統(tǒng)的數(shù)據(jù)源和受控對象均為仿真服務(wù)器提供的仿真模型����,為了能夠?qū)崟r運行仿真模型,實現(xiàn)在線訓(xùn)練��,首先模擬訓(xùn)練教學(xué)系統(tǒng)需要具備完成模型計算任務(wù)的仿真服務(wù)器�,負(fù)責(zé)訓(xùn)練過程所有模型的計算工作。訓(xùn)練人員的操作終端則直接采用平臺系統(tǒng)的標(biāo)準(zhǔn)PC機(jī)���,將訓(xùn)練系統(tǒng)軟件嵌入到PC機(jī)的監(jiān)控軟件中�。
船舶電力系統(tǒng)模型構(gòu)建復(fù)雜,其包含多臺發(fā)電機(jī)組���、配電板����、斷路器及負(fù)載等設(shè)備��,系統(tǒng)通過對上述設(shè)備的分析研究���,能夠正確顯示系統(tǒng)的控制狀態(tài)�����、各機(jī)組����、斷路器�、負(fù)載以及各配電板的位置關(guān)系、機(jī)組狀態(tài)���、斷路器狀態(tài)以及負(fù)載接入狀態(tài)等����。
功能簡介
- 多船模型切換:平臺可以支持多個艦船模型的仿真運行,并能夠在短時間內(nèi)進(jìn)行艦船模型的切換���,滿足多條船模擬訓(xùn)練要求�����。
- 船舶操縱臺:實現(xiàn)機(jī)組的啟動��、停機(jī)�、加速����、減速,發(fā)電機(jī)斷路器合閘��、分?jǐn)?����、跨接斷路器的合閘���、分?jǐn)?��、并車以及調(diào)頻調(diào)載等功能通過操作按鈕進(jìn)行操作。機(jī)組(停機(jī))故障進(jìn)行保護(hù)和分級卸載功能�。
- 遠(yuǎn)程數(shù)據(jù)通訊系統(tǒng):遠(yuǎn)程數(shù)據(jù)通訊系統(tǒng)采用UDP協(xié)議,主要實現(xiàn)工控機(jī)與工作站之間的遠(yuǎn)程實時通訊功能��,用于船舶操縱電控系統(tǒng)和船舶動力仿真系統(tǒng)之間的數(shù)據(jù)通訊中轉(zhuǎn)���。
- 船舶動力系統(tǒng)仿真機(jī):仿真機(jī)運行多套船舶動力系統(tǒng)模型���,模型包含燃油、柴油發(fā)動機(jī)模塊�����,動力控制模塊���,狀態(tài)監(jiān)測模塊����,網(wǎng)絡(luò)通信模塊����,能夠根據(jù)船舶操縱臺發(fā)出的數(shù)字控制指令重新計算和調(diào)整運行狀態(tài)���,并將船舶運行狀態(tài)通過通信系統(tǒng)反饋到工作站。